P5-4
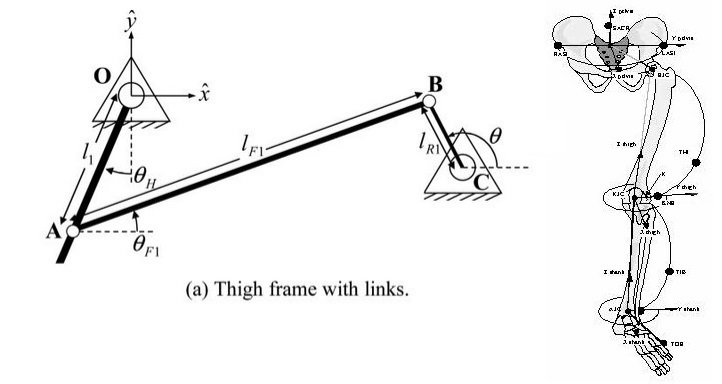
The above model of the human thigh joint is a 4-bar linkage. Using the parameters:
| Joint | l | theta |
|---|---|---|
| OA | 148mm | 30 |
| AB | 386mm | 22 |
| BC | 73mm | 130 |
If link OA is driven 0.deltadeltadeltadeltarad/s CCW, determine the linear velocity of point B and the angular velocity of link BC.