P7-4
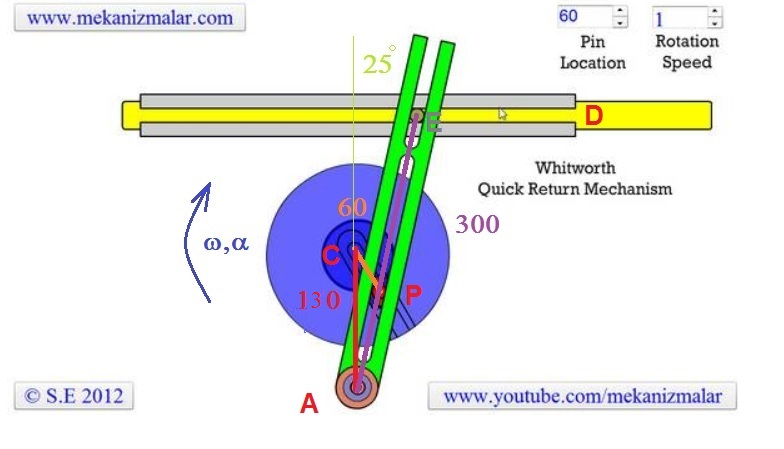
The Whitworth Quick Return Mechanism converts rotational motion to asymmetric reciprocal motion. The web site listed provides a splendid animation. Points A and C are vertically aligned with center to center distance of 130mm. At this instant the slotted arm is angled 25deg from the vertical. The pin P is 60mm from the center C of the driving wheel. Slider D is constrained to move horizontally. Pin E on D slides in the slotted arm. Pin E is 300mm from point A at this instant. If the driving wheel is rotating CW at angular velocity of 0.deltadeltadeltadeltarad/s and angular acceleration of 0.1deltadeltadeltadeltarad/s^2 determine the absolute velocity and acceleration of Slider D. Are these in the right directions?